Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Physical Address
304 North Cardinal St.
Dorchester Center, MA 02124
Discover the Best Drones: Trusted Reviews, Tips, and Guides
Discover the Best Drones: Trusted Reviews, Tips, and Guides
This post may contain affiliate links. As an Amazon Associate, we may earn commissions from qualifying purchases.
Have you ever wondered how drones manage to find their way back to their takeoff point with such precision?

One of the fascinating aspects of drones is their ability to return to their takeoff point, often with pinpoint accuracy. This doesn’t just happen by magic; it’s a result of sophisticated technology and intricate systems working together.
At the heart of this capability is the Global Positioning System (GPS). GPS is a satellite-based navigation system that provides location and time information in all weather conditions, anywhere on or near the Earth. The GPS module in a drone receives signals from multiple satellites to determine its precise location.
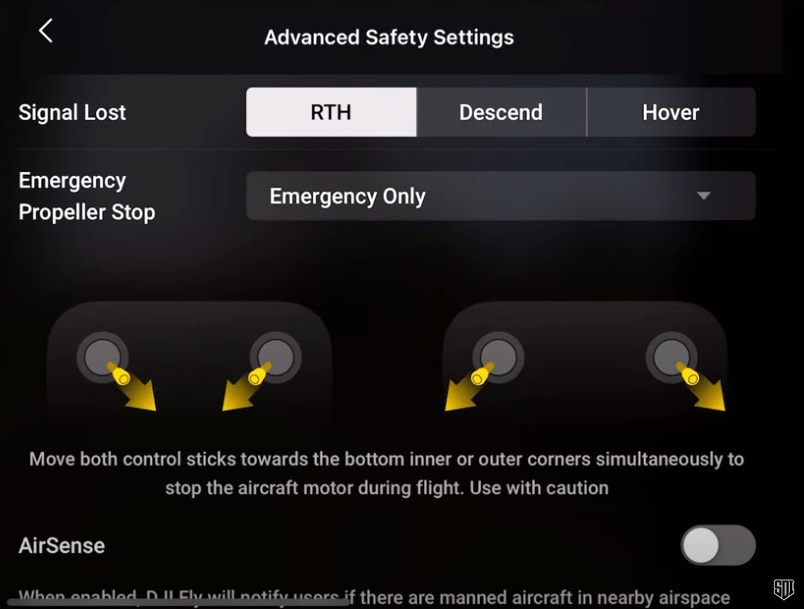
The Return-to-Home (RTH) function is a critical feature in most modern drones. This function allows the drone to automatically return to its takeoff point under certain conditions, such as low battery, loss of signal, or user command.
The RTH operation typically goes through these steps:
Drones also use an Inertial Measurement Unit (IMU) to navigate. The IMU measures the drone’s velocity, orientation, and gravitational forces, helping it maintain altitude and orientation during flight.
Understanding the different RTH modes gives you a better grasp of how drones return to their takeoff points.
Smart RTH is an advanced feature that allows the user to trigger the return-to-home function manually. You can initiate this mode through your controller or smartphone app.
This mode is automatically activated when the drone detects that its battery level is critically low. The drone calculates whether it has enough battery power to return to the takeoff point safely and initiates the RTH procedure.
Fail-safe RTH is triggered when the drone loses connection with its controller. This could happen due to interference or if the drone flies out of range. When this occurs, the drone will ascend to a preset altitude and return to the takeoff point.
Some advanced drones come equipped with sensors for obstacle avoidance during the RTH process. These sensors scan the environment to detect and avoid obstacles, ensuring a safe return.
Several components work in unison to make Return-to-Home (RTH) possible. Understanding these can demystify the entire process.
The GPS module in a drone is its primary navigation tool. It constantly communicates with satellites to keep track of the drone’s position.
The flight controller is the brain of the drone. It processes data from the GPS and IMU and controls the drone’s movements. During RTH, it calculates the best path back to the takeoff point.
The compass helps the drone to understand its orientation relative to the Earth’s magnetic field. This is particularly important for determining directions when returning home.
The IMU measures changes in the drone’s movement and orientation. It provides crucial data that helps the flight controller maintain stable flight and navigate back home.
Several factors can affect the accuracy and reliability of a drone’s RTH function.
The quality of the GPS signal directly influences how accurately a drone can pinpoint its location and navigate back to the takeoff point. Poor signal reception can result in less precise navigation.
Interference from magnetic fields or the Earth’s magnetic anomalies can affect the compass readings, leading to potential navigation errors.
Wind, rain, and other weather conditions can impact the drone’s ability to return home safely. Strong winds can push the drone off course, while rain can affect sensor performance.
A healthy battery is crucial for ensuring enough power remains to complete the journey back home. An old or poorly maintained battery may deplete faster, increasing the risk of failure during RTH.
Drones equipped with obstacle detection technologies have a higher success rate in RTH operations. However, this feature might not be foolproof against all types of obstacles like thin wires or transparent surfaces.

To make the most of your drone’s RTH feature, you can follow some best practices to ensure a safe return.
Before taking off, always perform pre-flight checks. Verify the GPS signal strength, calibrate the compass, and ensure your drone’s firmware is up-to-date.
Most drones allow you to set a specific altitude for the RTH procedure. Setting an appropriate altitude helps the drone avoid obstacles like trees and buildings during its return.
Keeping an eye on the battery level during flight ensures you can initiate an RTH procedure before the battery becomes critically low.
Make sure the takeoff area is clear of obstacles. This ensures that the drone has a safe landing space when it returns.
Being proficient in manual flight allows you to take control if something goes wrong during the RTH procedure. It’s always good to know how to fly your drone back manually in case of an emergency.
Even with advanced technology, you might occasionally face issues with the Return-to-Home function. Here are some common problems and how to address them.
Losing a GPS signal is a frequent issue that can disrupt the RTH process. Ensure that you’re flying in an area with a clear view of the sky and away from tall buildings or dense foliage that can block the signal.
Compass errors can cause your drone to lose orientation and fail to return to the takeoff point accurately. Regularly calibrate the compass and avoid flying near large metal structures or magnetic fields.
If your drone’s battery malfunctions, it may not have enough power to complete the RTH process. Always check the battery health before each flight and replace old batteries as needed.
Outdated or corrupt firmware can lead to various flight issues, including problems with the RTH function. Keep your drone’s firmware updated to the latest version provided by the manufacturer.
Strong winds, rain, or extreme temperatures can interfere with sensors and affect the RTH process. Always check the weather conditions before flying your drone.
As technology continues to evolve, the RTH function in drones is becoming more sophisticated. Here’s a look at what’s on the horizon.
Artificial Intelligence (AI) and Machine Learning are being integrated into drone technology to enhance navigation and obstacle avoidance capabilities. These advancements will allow drones to learn from their environment and make better decisions during the RTH process.
Future drones will be equipped with more advanced sensors, including LIDAR (Light Detection and Ranging) and improved sonar systems. These sensors will provide more accurate data for obstacle detection and avoidance.
Advancements in battery technology will result in longer flight times and more reliable power sources, reducing the risk of battery-related RTH failures.
With faster data processing capabilities, drones will be able to make quicker adjustments during the RTH process, improving accuracy and safety.
Future drones may integrate with other systems such as traffic monitoring or weather forecasting services. This integration can provide real-time data that helps the drone navigate more safely and efficiently.
Enhanced redundancy systems will ensure that even if one component fails, the drone will still be able to complete the RTH process. This might include backup GPS modules, secondary batteries, or alternative navigation systems.
Drones have come a long way from being simple remote-controlled devices to sophisticated flying machines with advanced navigation capabilities. The Return-to-Home (RTH) function is one of the key features that make modern drones user-friendly and safe. By understanding how this function works, you can better appreciate the technology that goes into making drones reliable and safe.
Having knowledge about the critical components, the different RTH modes, and the steps you can take to ensure a safe return will make your flying experience more enjoyable. As technology continues to evolve, you can look forward to even more advanced features that will further enhance the safety and reliability of drones.
Feel free to share your thoughts or ask questions about the RTH function. Your curiosity and feedback help drive continuous improvement in drone technology.